Матрица, виды матриц, действия над матрицами.
Виды матриц:
1. Прямоугольные : m и n - произвольные положительные целые числа
2. Квадратные : m=n
3. Матрица строка : m=1 . Например, (1 3 5 7) - во многих практических задачах такая матрица называется вектором
4. Матрица столбец : n=1 . Например
5. Диагональная матрица : m=n и a ij =0 , если i≠j . Например
6. Единичная матрица : m=n и

7. Нулевая матрица : a ij =0, i=1,2,...,m
j=1,2,...,n
8. Треугольная матрица : все элементы ниже главной диагонали равны 0.
9. Симметрическая матрица :m=n и a ij =a ji (т.е. на симметричных относительно главной диагонали местах стоят равные элементы), а следовательноA"=A
Например,
10. Кососимметрическая матрица : m=n и a ij =-a ji (т.е. на симметричных относительно главной диагонали местах стоят противоположные элементы). Следовательно, на главной диагонали стоят нули (т.к. при i=j имеем a ii =-a ii )

Действия над матрицами:
1. Сложение

2. Вычитание матриц - поэлементная операция

3. Произведение матрицы на число - поэлементная операция

4. Умножение A*B матриц по правилу строка на столбец (число столбцов матрицы А должно быть равно числу строк матрицы B)
A mk *B kn =C mn причем каждый элемент с ij матрицы C mn равен сумме произведений элементов i-ой строки матрицы А на соответствующие элемеенты j-го столбца матрицы B , т.е.

Покажем операцию умножения матриц на примере

5. Транспонирование матрицы А. Транспонированную матрицу обозначают A T или A"
 ,например
,например 
Строки и столбцы поменялись местами
Свойства операций над матрицами:
(A+B)+C=A+(B+C)
λ(A+B)=λA+λB
A(B+C)=AB+AC
(A+B)C=AC+BC
λ(AB)=(λA)B=A(λB)
A(BC)=(AB)C
(λA)"=λ(A)"
(A+B)"=A"+B"
(AB)"=B"A"
2. Определители второго и третьего порядка (основные понятия, св-ва, вычисления)



Свойство 1. Определитель не изменяется при транспонировании, т.е.

Доказательство.
Замечание. Следующие свойства определителей будут формулироваться только для строк. При этом из свойства 1 следует, что теми же свойствами будут обладать и столбцы.
Свойство 2 . При умножении элементов строки определителя на некоторое число весь определитель умножается на это число, т.е.

 .
.
Доказательство.
Свойство 3. Определитель, имеющий нулевую строку, равен 0.

Доказательство этого свойства следует из свойства 2 при k = 0.
Свойство 4. Определитель, имеющий две равные строки, равен 0.

Доказательство.
Свойство 5 . Определитель, две строки которого пропорциональны, равен 0.

Доказательство следует из свойств 2 и 4.
Свойство 6 . При перестановке двух строк определителя он умножается на –1.


Доказательство.
Свойство 7.



Доказательство этого свойства можно провести самостоятельно, сравнив значения левой и правой частей равенства, найденные с помощью определения 1.5.
Свойство 8. Величина определителя не изменится, если к элементам одной строки прибавить соответствующие элементы другой строки, умноженные на одно и то же число.


Минор. Алгебраическое дополнение. Теорема Лапласа.





Метод приведения к треугольному виду заключается в таком преобразовании данного определителя, когда все элементы его, лежащие по одну сторону одной из его диагоналей, становятся равными нулю.
Пример 8. Вычислить определитель
 приведением к треугольному виду.
приведением к треугольному виду.
Решение. Вычтем первую строку определителя из остальных его строк. Тогда получим
 .
.
Этот определитель равен произведению элементов главной диагонали. Таким образом, имеем
Замечание. Всё рассмотренное выше можно обобщить для определителей n-го порядка.
Приведение матрицы к ступенчатому виду. Элементарные преобразования строк и столбцов.
Элементарными преобразованиями матрицы называются следующие ее преобразования:
I. Перестановка двух столбцов (строк) матрицы.
II. Умножение всех элементов одного столбца (строки) матрицы на одно и то же число, отличное от нуля.
III. Прибавление к элементам одного столбца (строки) соответствующих элементов другого столбца (строки), умноженных на одно и то же число.
Матрица , полученная из исходной матрицы конечным числом элементарных преобразований, называется эквивалентной . Это обозначается .
Элементарные преобразования применяются для упрощения матриц, что будет в дальнейшем использоваться для решения разных задач.
Чтобы привести матрицу к ступенчатому виду (рис. 1.4), нужно выполнить следующие действия.
1. В первом столбце выбрать элемент, отличный от нуля (ведущий элемент ). Строку с ведущим элементом (ведущая строка ), если она не первая, переставить на место первой строки (преобразование I типа). Если в первом столбце нет ведущего (все элементы равны нулю), то исключаем этот столбец, и продолжаем поиск ведущего элемента в оставшейся части матрицы. Преобразования заканчиваются, если исключены все столбцы или в оставшейся части матрицы все элементы нулевые.
2. Разделить все элементы ведущей строки на ведущий элемент (преобразование II типа). Если ведущая строка последняя, то на этом преобразования следует закончить.
3. К каждой строке, расположенной ниже ведущей, прибавить ведущую строку, умноженную соответственно на такое число, чтобы элементы, стоящие под ведущим оказались равными нулю (преобразование III типа).
4. Исключив из рассмотрения строку и столбец, на пересечении которых стоит ведущий элемент, перейти к пункту 1, в котором все описанные действия применяются к оставшейся части матрицы.
Пример 1.29. Привести к ступенчатому виду матрицы

Элементарные преобразования матрицы находят широкое применение в различных математических задачах. Например, они составляют основу известного метода Гаусса (метода исключения неизвестных) для решения системы линейных уравнений .
К элементарным преобразованиям относятся:
1) перестановка двух строк (столбцов);
2) умножение всех элементов строки (столбца) матрицы на некоторое число, не равное нулю;
3) сложение двух строк (столбцов) матрицы, умноженных на одно и то же число, отличное от нуля.
Две матрицы называются эквивалентными , если одна из них может быть получена из другой после конечного числа элементарных преобразований. В общем случае эквивалентные матрицы равными не являются, но имеют один и тот же ранг.
Вычисление определителей с помощью элементарных преобразований
С помощью элементарных преобразований легко вычислить определитель матрицы. Например, требуется вычислить определитель матрицы:
Тогда можно вынести множитель :
теперь, вычитая из элементов j -го столбца соответствующие элементы первого столбца, умноженные на , получим определитель:
который равен: где
Затем повторяем те же действия для и, если все элементы то тогда окончательно получим:
Если для какого-нибудь промежуточного определителя окажется, что его левый верхний элемент , то необходимо переставить строки или столбцы в так, чтобы новый левый верхний элемент был не равен нулю. Если Δ ≠ 0, то это всегда можно сделать. При этом следует учитывать, что знак определителя меняется в зависимости от того, какой элемент является главным (то есть, когда матрица преобразована так, что ). Тогда знак соответствующего определителя равен .
П р и м е р. С помощью элементарных преобразований привести матрицу
к треугольному виду.
Р е ш е н и е. Сначала умножим первую строку матрицы на 4, а вторую на (–1) и прибавим первую строку ко второй:
Теперь умножим первую строку на 6, а третью на (–1) и прибавим первую строку к третьей:
Наконец, умножим 2-ю строку на 2, а 3-ю на (–9) и прибавим вторую строку к третьей:
В результате получена верхняя треугольная матрица
Пример. Решить систему линейных уравнений, используя матричный аппарат:
Р е ш е н и е. Запишем данную систему линейных уравнений в матричной форме:
Решение данной системы линейных уравнений в матричной форме имеет вид:
где – матрица, обратная к матрице А .
Определитель матрицы коэффициентов А равен:
следовательно, матрица А имеет обратную матрицу .
2. Мальцев А.И. Основы линейной алгебры. – М.: Наука, 1975. – 400 с.
3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. – М.: Наука, 1986. – 544 с.
Матрица преобразований применяется для вычисления новых координат объекта при его трансформации. Изменяя значения элементов матрицы преобразования, к объектам можно применять любые трансформации (например: масштабирование, зеркальное отражение, поворот, перемещение и т. п.). При любой трансформации сохраняется параллельность линий объекта.
Координаты в PDF выражаются в терминах двумерного пространства. Точка (x, y) в пространстве может быть выражена в векторной форме . Постоянный третий элемент этого вектора (1) нужен для использования вектора с матрицами 3х3 в вычислениях, описанных ниже.
Преобразование между двумя системами координат представлено, как матрица 3х3 и записывается следующим образом:
Координатные преобразования выражаются в виде матричных умножений:
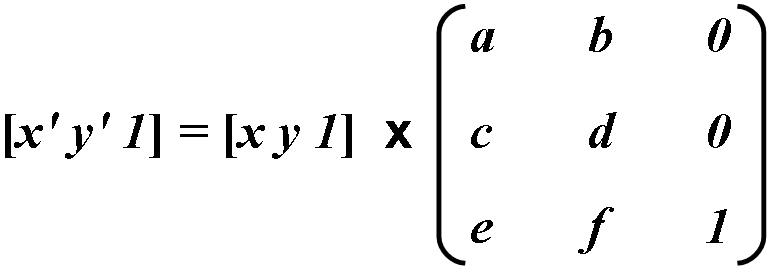
Так как последняя колонка не оказывает ни какого влияния на результаты расчета, то она в вычислениях не принимает участия. Координаты трансформации высчитываются по следующим формулам:

Единичная матрица
Единичной матрицей называется, та у которой значения матрицы a и d равны 1 , а остальные равны 0 . Такая матрица применяется по умолчанию, так как не приводит к трансформации. Поэтому единичную матрицу используют как основу.

Масштабирование
Для увеличения или уменьшения размера объекта по горизонтали/вертикали следует изменить значение a или d соответственно, а остальные применить из единичной матрицы.
Например: Для увеличения размера объекта в два раза по горизонтали, значение a необходимо принять равным 2, а остальные оставить такими как в единичной матрице.



Отражение
Чтобы получить зеркальное отображение объекта по горизонтали следует установить значение a = -1 , по вертикали d = -1 . Изменение обеих значений применяется для одновременного отображения по горизонтали и вертикали.


Наклон
Наклон объекта по вертикали/горизонтали обеспечивается изменением значений b и c соответственно. Изменение значения b/-b - наклон вверх/вниз, c/-c – вправо/влево.
Например: Для наклона объекта по вертикали вверх установим значение b = 1

Высчитываем новые координаты объекта:


В итоге к наклону объекта приводит только координата y , которая увеличивается на значение x .
Поворот
Поворот — это комбинация масштабирования и наклона, но для сохранения начальных пропорций объекта, преобразования должны проводится с точными вычислениями при использовании синусов и косинусов.

Сам поворот происходит против часовой стрелки, α задаёт угол поворота в градусах.
Перемещение
Перемещение осуществляется изменением значений e (по горизонтали) и f (по вертикали). Значения задаются в пикселях.
Например: Перемещение с использованием матрицы применяется редко из-за того, что эту операцию можно проделать другими методами, например, изменить положение объекта во вкладке .
Поскольку матрица трансформации имеет только шесть элементов, которые могут быть изменены, визуально она отображается в PDF . Такая матрица может представлять любое линейное преобразование из одной координатной системы в другую. Матрицы преобразований образуются следующим образом:
- Перемещения указываются как , где t x и t y — расстояния от оси системы координат по горизонтали и вертикали, соответственно.
- Масштабирование указывается как . Это масштабирует координаты так, что 1 единица в горизонтальном и вертикальном измерениях в новой координатной системе такого же размера, как и s x и s y единиц в старой координатной системе соответственно.
- Повороты производятся матрицей , что соответствует повороту осей координатной системы на θ градусов против часовой стрелки.
- Наклон указывается как , что соответствует наклону оси x на угол α и оси y на угол β .
На рисунке ниже показаны примеры трансформации. Направления перемещения, угол поворота и наклона, показанные на рисунке, соответствуют положительным значениям элементов матрицы.

Умножения матрицы не коммутативны — порядок, в котором перемножаются матрицы, имеет значение.
В таблице ниже приведены допустимые преобразования и значения матрицы.
| Исходный рисунок | Трансформированный рисунок | Матрица | Описание |
|---|---|---|---|
 |
 |
1 0
0 2 0 0 |
Масштаб по вертикали. Если значение матрицы больше 1, объект расширяется, меньше 1 — сжимается. |
|
 |
2 0
0 1 0 0 |
Масштаб по горизонтали. Если значение матрицы больше 1, объект расширяется, меньше 1 — сжимается. |
|
 |
-1 0
0 1 0 0 |
Отражение по горизонтали. |
|
 |
1 0
0 -1 0 0 |
Отражение по вертикали. |
|
 |
1 1
0 1 0 0 |
Наклон по вертикали вверх. |
|
 |
1 -1
0 1 0 0 |
Наклон по вертикали вниз. |
|
 |
1 0
1 1 0 0 |
Наклон по горизонтали вправо. |
|
 |
1 0
-1 1 0 0 |
Элементарными преобразованиями называют следующие действия над строками и столбцами матрицы A:
1) перестановку местами двух строк или столбцов матрицы;
2) умножение строки или столбца матрицы на число, отличное от нуля;
3) прибавление к одной строке (столбцу) другой строки (столбца).
Теорема. Элементарные преобразования не меняют ранг матрицы, то есть, если матрица B получена из матрицы A элементарными преобразованиями, то.
Доказательство. 1). При перестановке местами двух столбцов матрицы максимальное число линейно независимых столбцов не меняется, а значит, не меняется и её ранг.
2). Пусть матрица Bполучена из матрицыAумножениемi- ой строки на числоt0 иr(A) =k. Очевидно, любой минор матрицыB, не содержащийi- тую строку, равен соответствующему минору матрицыA, а любой минор матрицыB, содержащийi-тую строку, равен соответствующему минору матрицыAумноженному на числоt. Следовательно, минор порядкаkматрицыB, соответствующий базисному минору матрицыA, будет отличен от нуля, а все миноры порядкаk+1 матрицыB, как и все миноры порядкаk+1 матрицыA, будут равны нулю. А это значит, чтоr(B)=k=r(A).
3). Пусть матрица Bполучена из матрицыAприбавлениемi- ой строки кj-той строке иr(A) =k. Миноры порядкаk+1 матрицыB, не содержащиеj-тую строку, будут равны соответствующим минорам матрицыA, и поэтому равны нулю. Миноры порядкаk+1 матрицыB, содержащиеi- тую иj-тую строки, будут равны сумме двух нулевых определителей. Один из этих определителей содержит две одинаковых строки (вj-той строке расположены элементыi–той строки), а второй определитель является минором порядкаk+1 матрицыAи поэтому равен нулю. Миноры порядкаk+1 матрицыB, содержащиеj-тую строку, но не содержащиеi-тую строку, будут равны сумме двух миноров порядкаk+1 матрицыAи поэтому тоже будут равны нулю. Следовательно, все миноры порядкаk+1 матрицыBравны 0 иr(B)k=r(A).
Пусть матрица Cполучена из матрицыBумножениемi–той строки на (-1). Тогда матрицаAполучается из матрицыCприбавлениемi–той строки кj-той строке и умножениемi–той строки на (-1). Следовательно, как было доказано выше, будетr(A)r(C) =r(B). Таким образом, одновременно справедливы неравенстваr(B)r(A) иr(A)r(B) откуда следует, чтоr(A) =r(B).
Это свойство элементарных преобразований используют на практике для вычисления ранга матрицы. Для этого, при помощи элементарных преобразований, приводят данную (ненулевую) матрицу A к трапецевидной форме, то есть к виду
B
=
 ,
,
где элементы для всех i = 1,2,...,k; элементыдля всех i > j и
i > k. Очевидно, что r(B) = k, то есть ранг матрицы Bравен числу ненулевых строк. Это следует из того, что минор порядка k матрицыB, расположенный на пересечении первых k строк и столбцов, является определителем диагонального вида и равен; а любой минор порядка k+1 матрицы В содержит нулевую строку, а значит, равен 0 (либо, если k = n, таких миноров нет вообще).
Теорема. Любую ненулевую матрицуAразмерностиmnможно привести к трапецевидной форме при помощи элементарных преобразований.
Доказательство.
Так какA0, то существует элемент матрицы .
Переставив местами первую иi-тую
строки, первый иj-тый
столбцы, переместим элемент
.
Переставив местами первую иi-тую
строки, первый иj-тый
столбцы, переместим элемент в
левый верхний угол матрицы и обозначим
в
левый верхний угол матрицы и обозначим .
Затем кi-той строке
полученной матрицы (i=
2,3, …,m) прибавим первую
строку, умноженную на число
.
Затем кi-той строке
полученной матрицы (i=
2,3, …,m) прибавим первую
строку, умноженную на число .
В результате этих элементарных
преобразований получим матрицу
.
В результате этих элементарных
преобразований получим матрицу
A .
.
Если
все элементы
 матрицыAравны нулю, то теорема доказана. Если
же существует элемент
матрицыAравны нулю, то теорема доказана. Если
же существует элемент ,
то, перестановкой второй иi-той
строк, второго иj-того
столбцов матрицыA,
переместим элемент
,
то, перестановкой второй иi-той
строк, второго иj-того
столбцов матрицыA,
переместим элемент на место элемента
на место элемента и обозначим
и обозначим (если
(если ,
тогда сразу обозначим
,
тогда сразу обозначим ).
Затем кi-той строке
полученной матрицы (i= 3,
…,m) прибавим вторую
строку, умноженную на число
).
Затем кi-той строке
полученной матрицы (i= 3,
…,m) прибавим вторую
строку, умноженную на число .
В результате получим матрицу
.
В результате получим матрицу

 .
.
Продолжив этот процесс, за конечное число шагов получим матрицу B, то есть приведем матрицуAк трапецевидной форме.
Пример. Вычислим ранг матрицы





 .
Стрелками обозначены следующие
элементарные преобразования: 1) переставили
местами первую и вторую строки; 2)
прибавили к четвертой строке третью;
3) прибавили к третьей строке первую,
умноженную на -2, и четвертую строку
поделили на 3; 4) поделили третью строку
на 5 и переставили местами третью и
четвертую строки; 5) к третьей строке,
умноженной на -3, прибавили вторую строку
и к четвертой строке прибавили третью.
Видно, что матрица, полученная из матрицы
А указанными элементарными преобразованиями,
имеет трапецевидную форму с тремя
ненулевыми строками. Следовательно,
r(A) = 3.
.
Стрелками обозначены следующие
элементарные преобразования: 1) переставили
местами первую и вторую строки; 2)
прибавили к четвертой строке третью;
3) прибавили к третьей строке первую,
умноженную на -2, и четвертую строку
поделили на 3; 4) поделили третью строку
на 5 и переставили местами третью и
четвертую строки; 5) к третьей строке,
умноженной на -3, прибавили вторую строку
и к четвертой строке прибавили третью.
Видно, что матрица, полученная из матрицы
А указанными элементарными преобразованиями,
имеет трапецевидную форму с тремя
ненулевыми строками. Следовательно,
r(A) = 3.
Похожие статьи



